

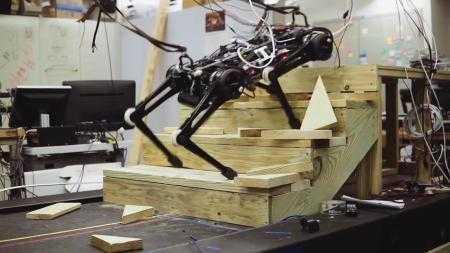
 Учёных из MIT изобрела четвероногого робота под названием Cheetah 3, который может прыгать, бегать, ходить, сохранять равновесие при влиянии внешних факторов и подниматься по лестнице.
Учёных из MIT изобрела четвероногого робота под названием Cheetah 3, который может прыгать, бегать, ходить, сохранять равновесие при влиянии внешних факторов и подниматься по лестнице.
На устройстве отсутствуют камеры, а вследствие применения новых механизмов оно может выполнять разные действия и передвигаться на ощупь в окружающей среде.
Создатели считают, что если бы робот полагался на WYSIWYG восприятие окружающей его обстановки, то это могло бы тормозить робота либо вынудить его наебнуться споткнуться, в случае если камера не заметит преграду, и поэтому учёные желают обучить робота продвигаться наощуть.
Такой робот может быть полезен в таких участках, в которые не имеют возможность направиться люди, к примеру, в дебри атомной электростанций. Так впоследствии крушения на атомной электростанции Фукусима в Японии радиационный фон вывел из строя камеру установленную на роботе, направленном в недры электростанции собирать ядерное горючее - а у Cheetah 3 подобных сложностей не появится.
«Грязную, опасную и сложную работу можно сделать намного безопаснее при помощи дистанционно управляемых роботов», — говорит один из участников проекта.
В результате, команда оборудовала Cheetah 3 новыми механизмами и датчиками, дабы предоставить ему чувство тела в космосе. В частности обновлённая платформа включает усовершенствованную аппаратную часть, которая сейчас может скручиваться и вытягиваться. Новые "предсказывательные" механизмы дают возможность Cheetah 3 сохранять равновесие и изменять шаг подстраиваясь к окружающей обстановке.
